Publications
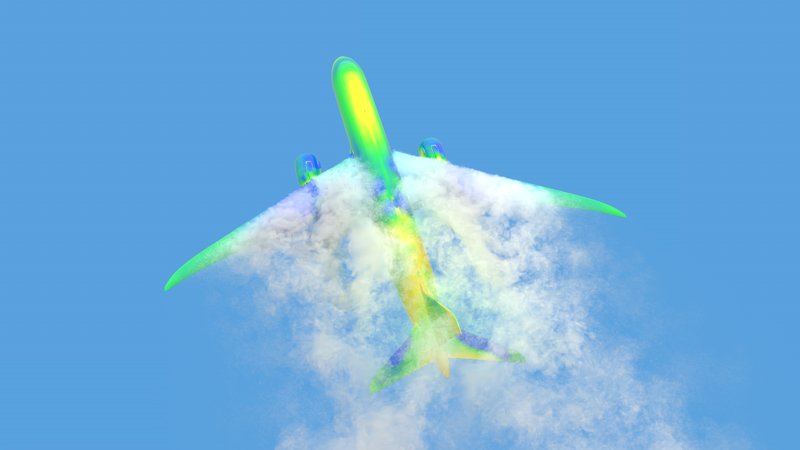
A Highly-Efficient Hybrid Simulation System for Flight Controller Design and Evaluation of Unmanned Aerial Vehicles
Jiwei Wang, Wenbin Song, Yicheng Fan, Yang Wang, and Xiaopei Liu
ACM Transactions on Graphics (SIGGRAPH Asia 2025), Volume 44, Issue 6, Article 198, 2025 — Best Paper Honorable Mention Award

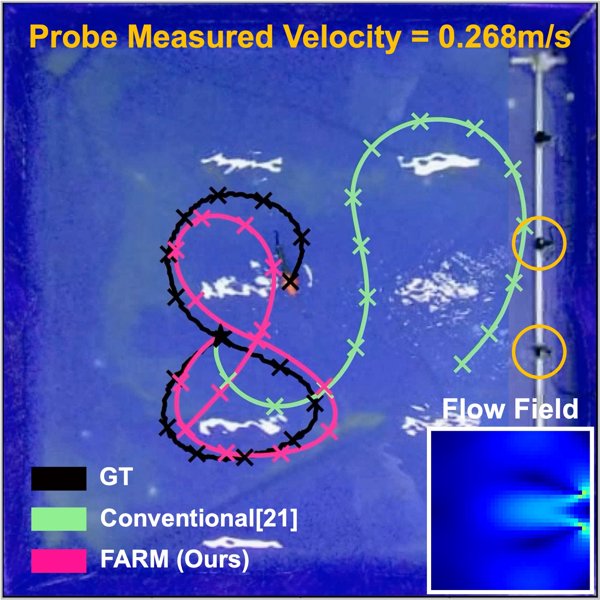
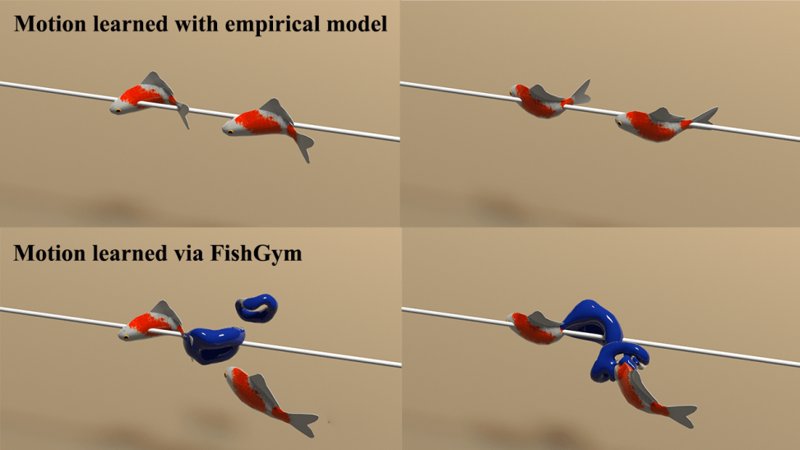
Creating Fluid-Interactive Virtual Agents by an Efficient Simulator with Local-domain Control
Wenbin Song, Heng Zhang, Yang Wang, Xiaopei Liu
ACM Transactions on Graphics (SIGGRAPH 2025), Volume 44, Issue 4, Article 103, 2025 — Video clip selected in the technical paper trailer

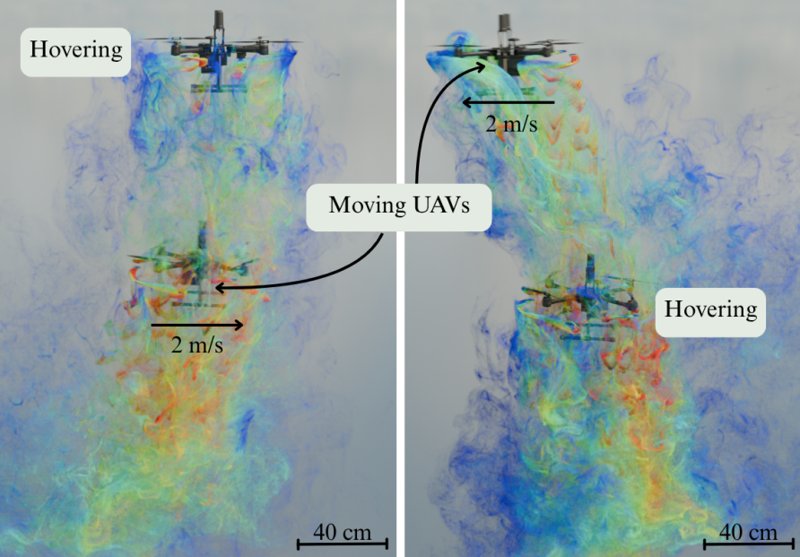
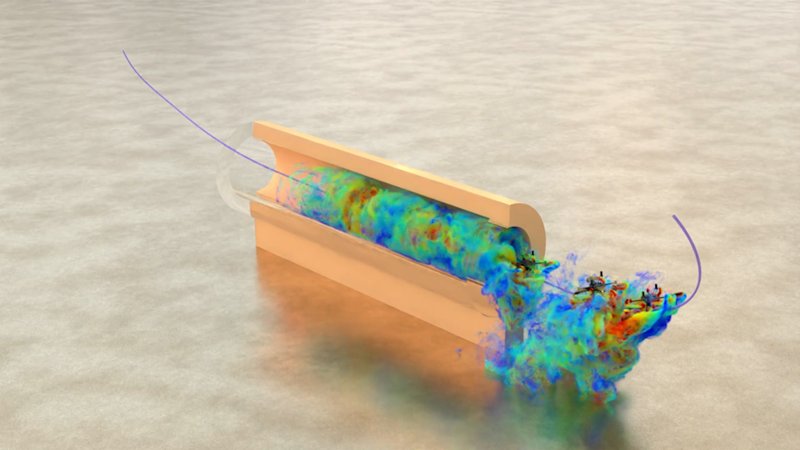
A Spatiotemporal Downwash Modeling for Agile Close-Proximity Multirotor Flight
Pavel Kharitenko, Yicheng Fan, Xiaopei Liu, Yang Wang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025), Accepted, 2025

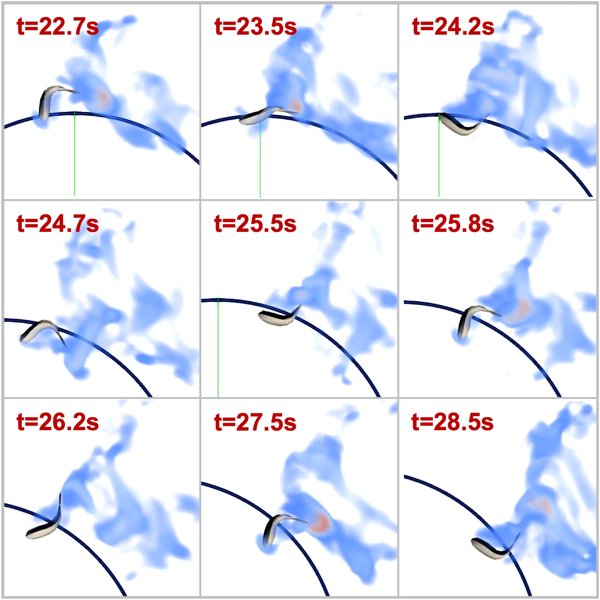
Multi-Level Progressive Reinforcement Learning for Control Policy in Physical Simulations
Kefei Wu, Xuming He, Yang Wang and Xiaopei Liu
IEEE International Conference on Robotics and Automation (ICRA 2024), 2024
Data-Driven Modeling of Ground Effect For UAV Landing on a Vertical Oscillating Platform
Binglin He, Heng Zhang, Baisheng Lai, Song Liu, Yang Wang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), Accepted, 2024